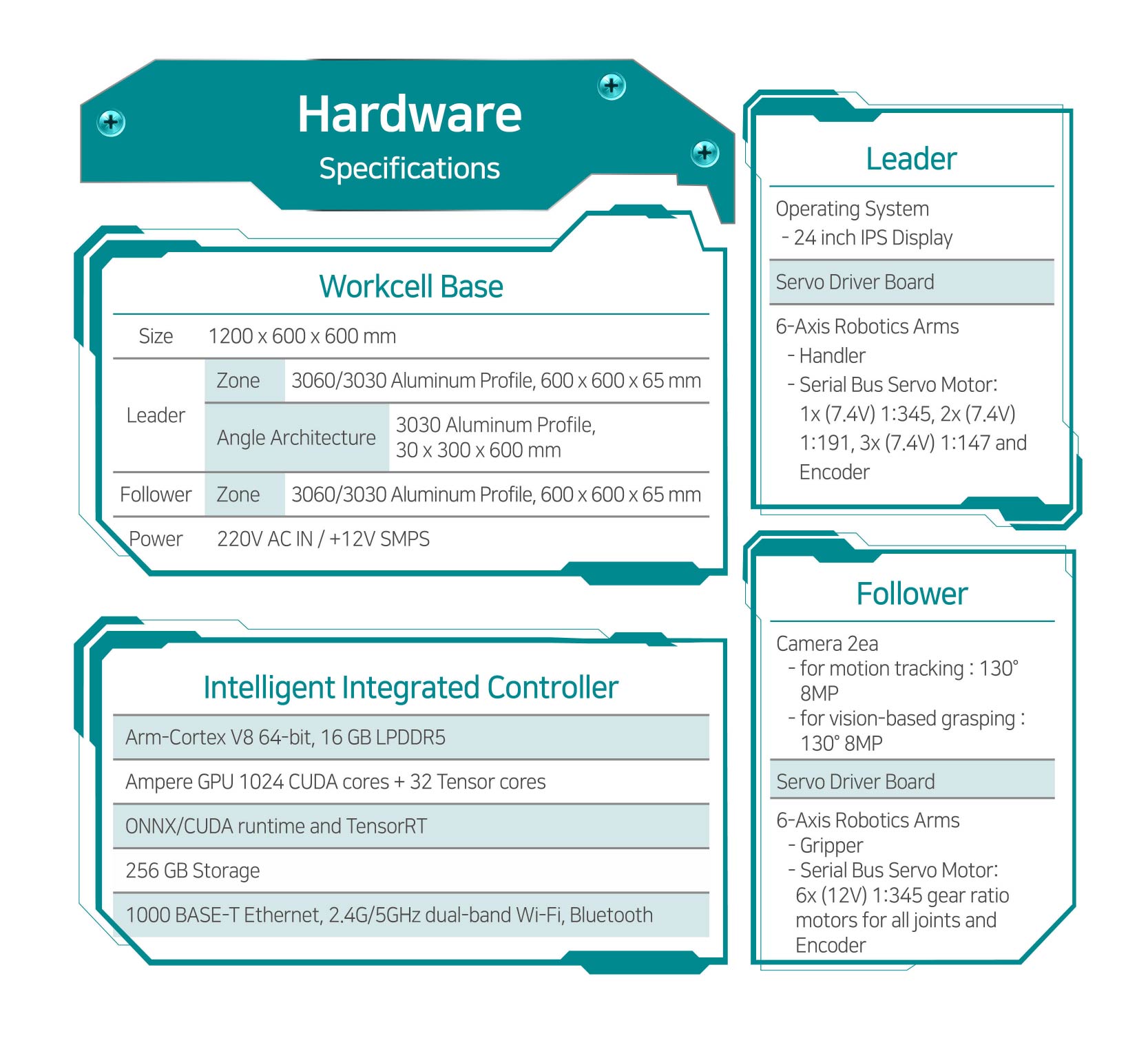
Physical AI robot training equipment for imitation and reinforcement learning consisting of two 6-axis robot arms, intelligent robot controller, work cell base
Enhance mobility and scalability by placing leader robot and follower robot on separate aluminum profile base
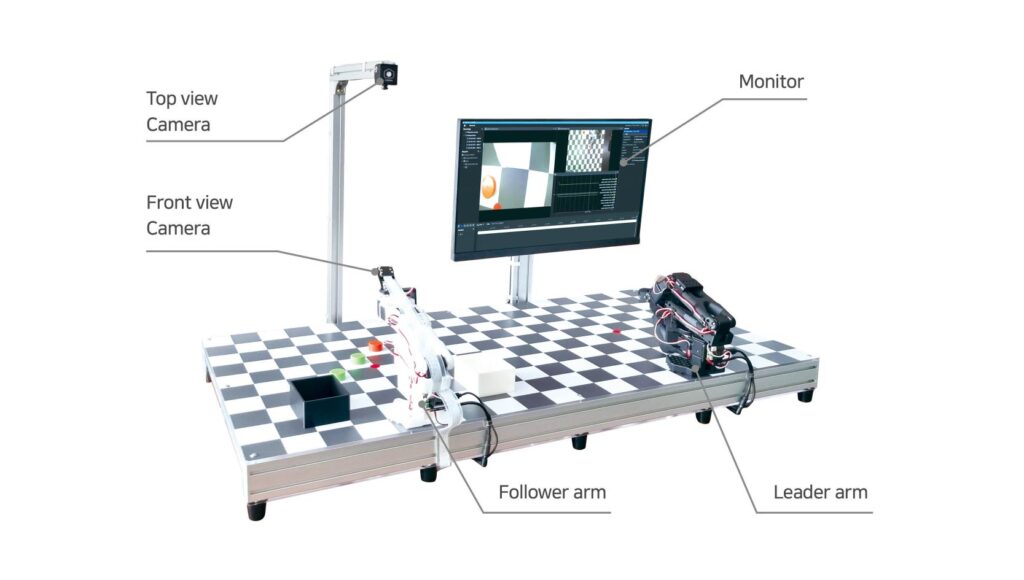
GUI-based data view∙labeling∙replay are possible through monitor∙camera∙ microphone included in leader robot
Configure view calibration∙AR marker∙segmentation∙pose estimation pipeline through follower robot and two cameras in follower robot
Establish strong grip against lighting∙layout change through camera-based vision grasping
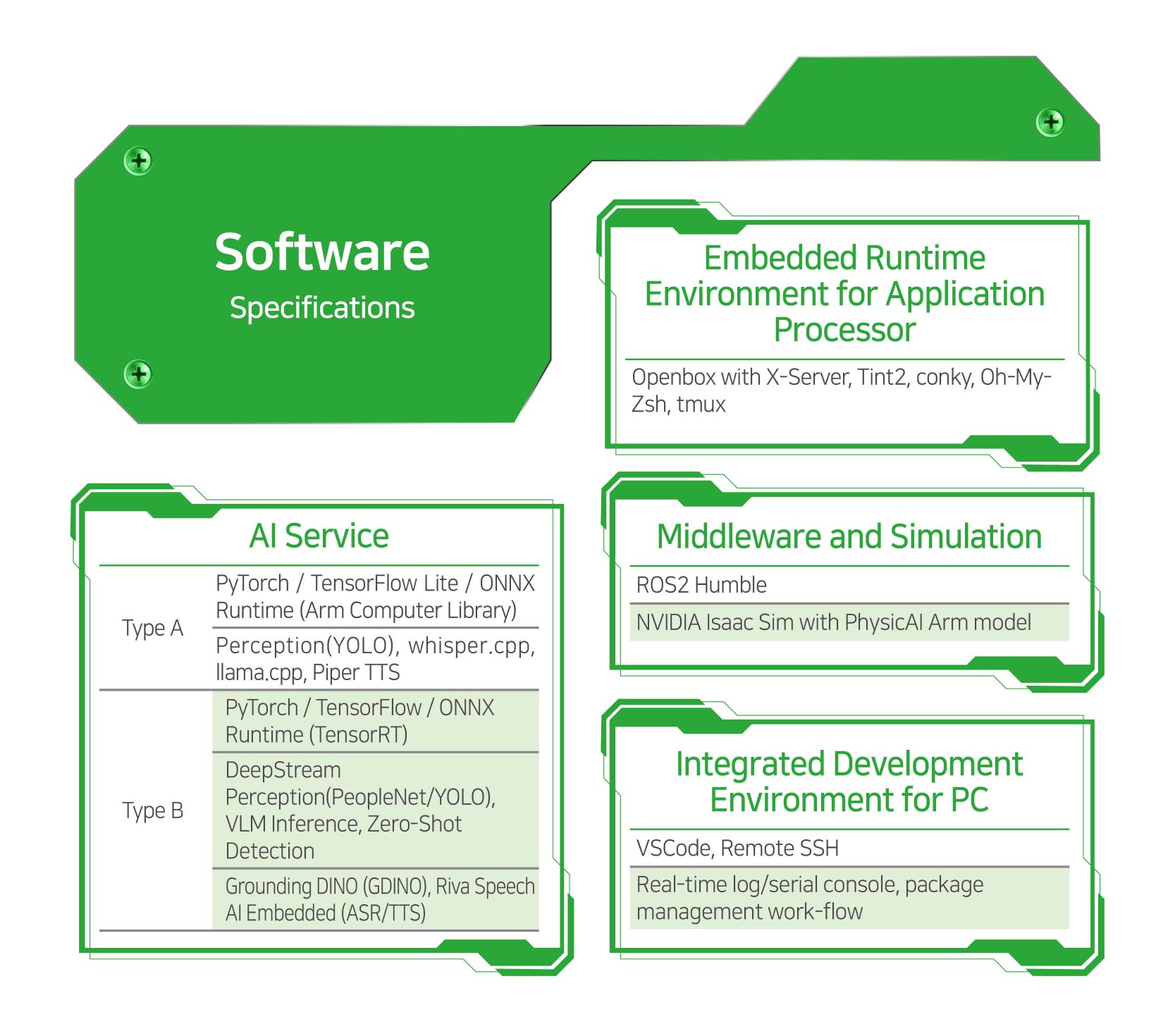
Support imitation learning and reinforcement on both leader and follower robot using intelligent robot controller integrated with ROS 2 open stack
Provide model∙dataset∙toolchain integrated into PyTorch to easily reproduce and share real-world robotics AI
Consistently manage teleoperation∙dataset standardization∙policy learning∙evaluation∙ reproduction in a single framework
Support training experiment based on safety training, synthetic data generation, domain randomization through two-way synchronized simulation with real equipment
Synchronized multimodal data, verification on digital twin, safe learning∙deployment on real equipment
Generative AI integration is possible such as diffusion policy, VLM/VLA, prompt-based control
Provide examples of block pick-and-place based on teleoperation data collection and Behavior Cloning
Provide digital twin example based on NVIDIA Isaac Sim