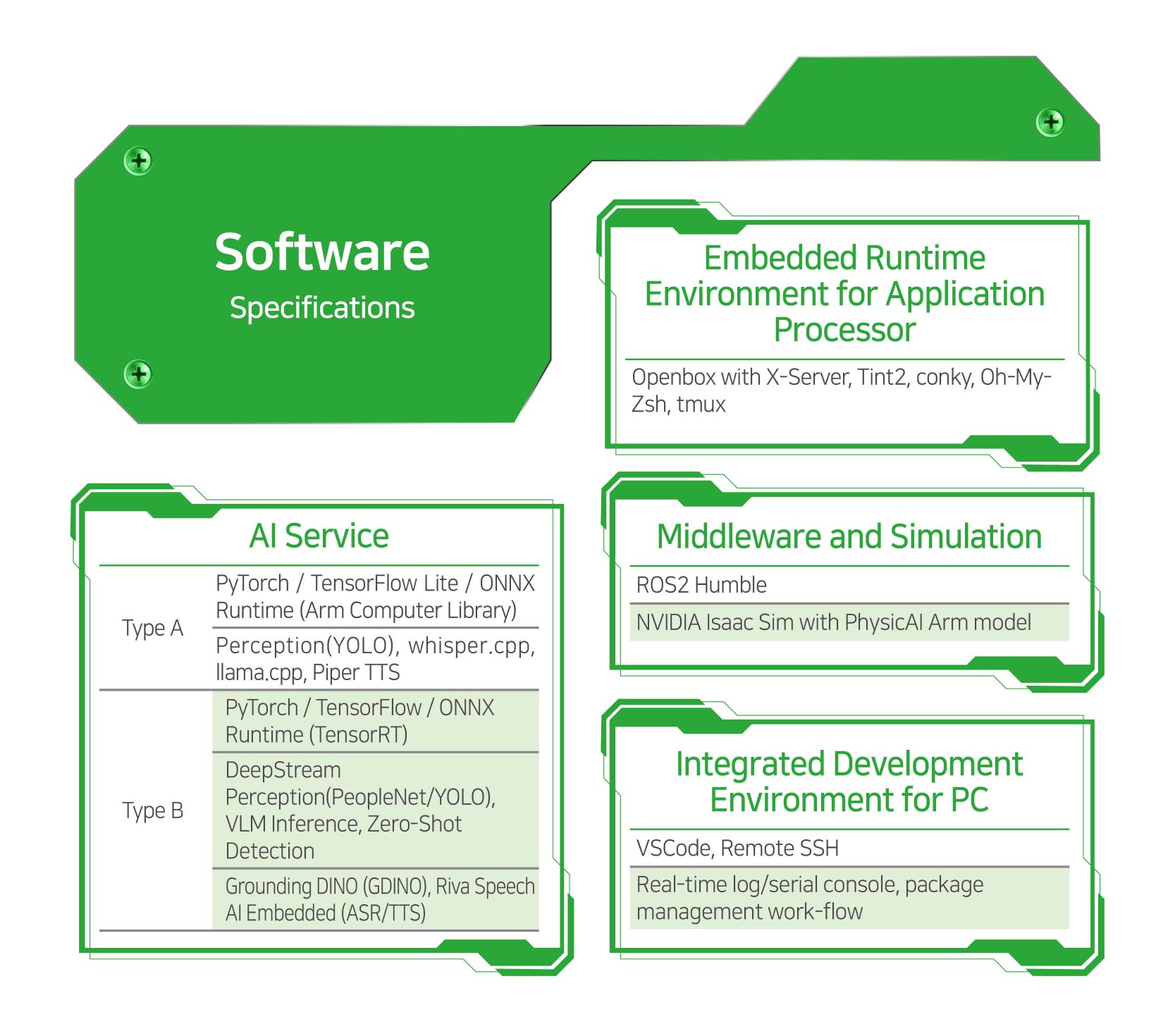
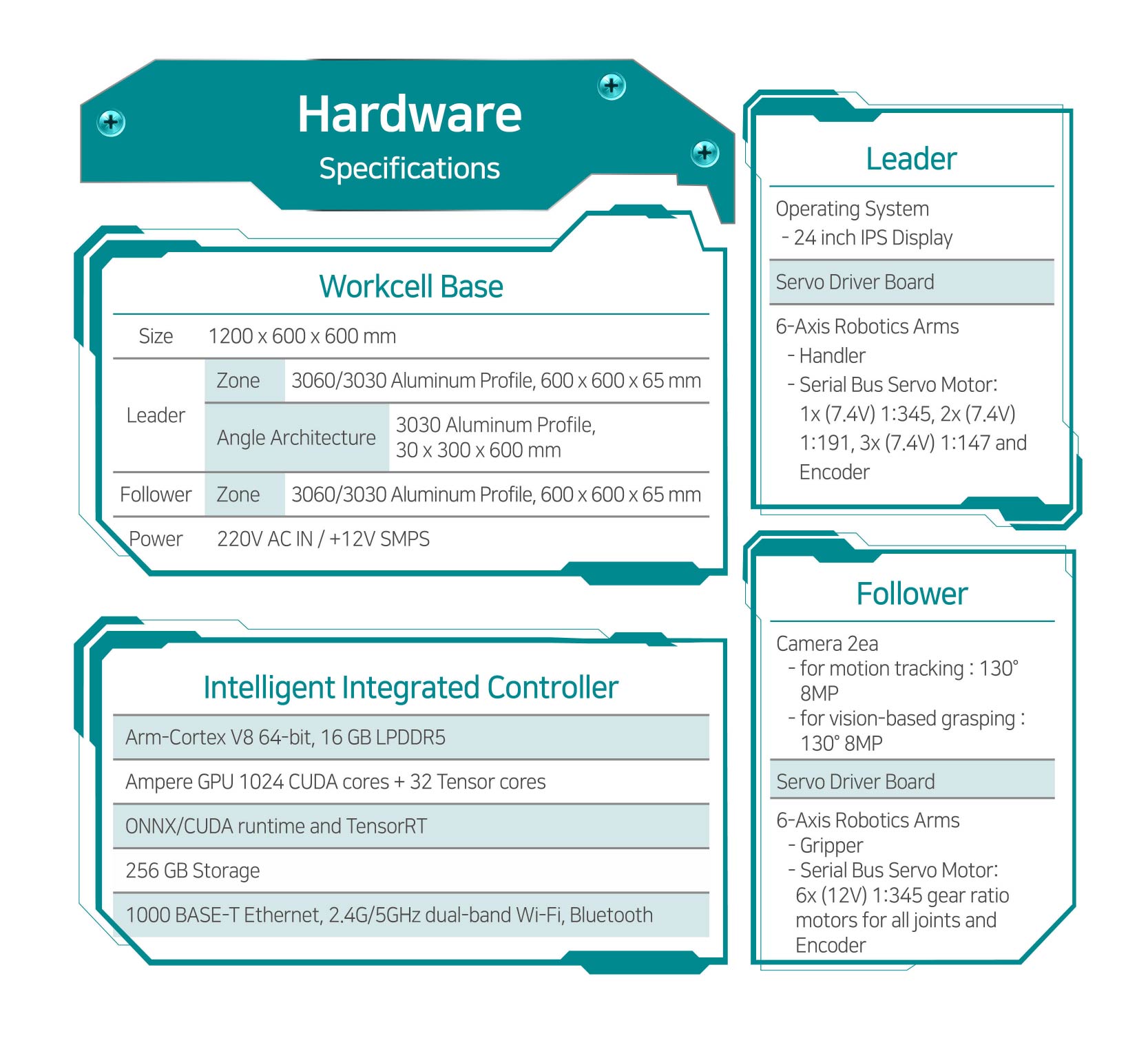
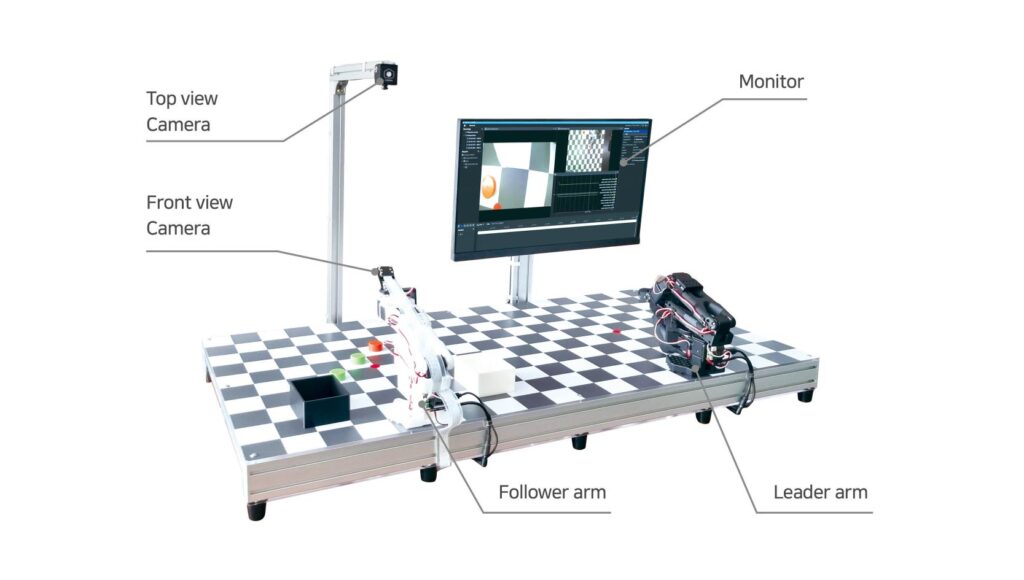
PhysicAI Arm Catalogue 제품 특징 2대의 6축 로봇팔, 지능형 로봇 제어기, 워크셀 베이스로 구성된 모방학습·강화학습용 피지컬 AI 로봇 실습 장비분리 가능한 알루미늄 프로파일 베이스 위에 리더 로봇과 팔로우 로봇을 각각 배치해 이동성과 확장성 강화리더 로봇 영역에 포함된 모니터·카메라·마이크를 통해 GUI 기반 데이터 뷰·라벨링·리플레이가 가능팔로우 로봇과 팔로우 로봇 영역의 2대 카메라를 통해 시야 캘리브레이션·AR 마커·세그멘테이션·포즈 추정 파이프라인 구성 가능카메라 기반 비전 그라스핑으로 조명·배치 변화에 강한 그립 구현ROS 2 개방형 스택을 통합한 지능형 로봇 제어기로 리더·팔로우 로봇 양쪽에서 모방학습·강화학습 지원실세계 중심 로보틱스 AI를 쉽게 재현·공유할 수 있도록 모델·데이터셋·툴체인을 PyTorch로 통합 제공텔레오퍼레이션 · 데이터셋 표준화 · 정책 학습 · 평가 · 재현 실행을 단일 프레임워크로 일관 운영실장비와 양방향 동기화되는 시뮬레이션으로 안전 교육, 합성 데이터 생성, 도메인 랜덤화 기반 실습 지원동기화된 멀티모달 데이터로 시작해, 디지털 트윈에서 검증하고, 실장비에서 안전하게 학습·배포까지 지원확산 정책, VLM/VLA, 프롬프트 기반 제어 등 생성형 AI 연계 가능텔레오퍼레이션 데이터 수집 및 Behavior Cloning 기반 블록 픽앤플레이스 예제 제공NVIDIA Isaac Sim 기반 디지털 트윈 예제 제공 레이아웃 교육내용 물리적 AI & PhysicAI-Arm 파이프라인 개요ROS2 기초 & 인터페이스 표준화비전 파이프라인 Ⅰ — 카메라 캘리브레이션데이터 수집 전략 & 품질 관리Behavior Cloning(BC) 베이스라인모델 평가 & 실험 관리 확산 정책(Diffusion Policy) & 액션 스무딩비전 파이프라인 Ⅱ — Grasping 핵심Isaac Sim 연동 & 디지털 트윈ROS2 기반 배포 & 안정화생성형 AI 연계 구성품