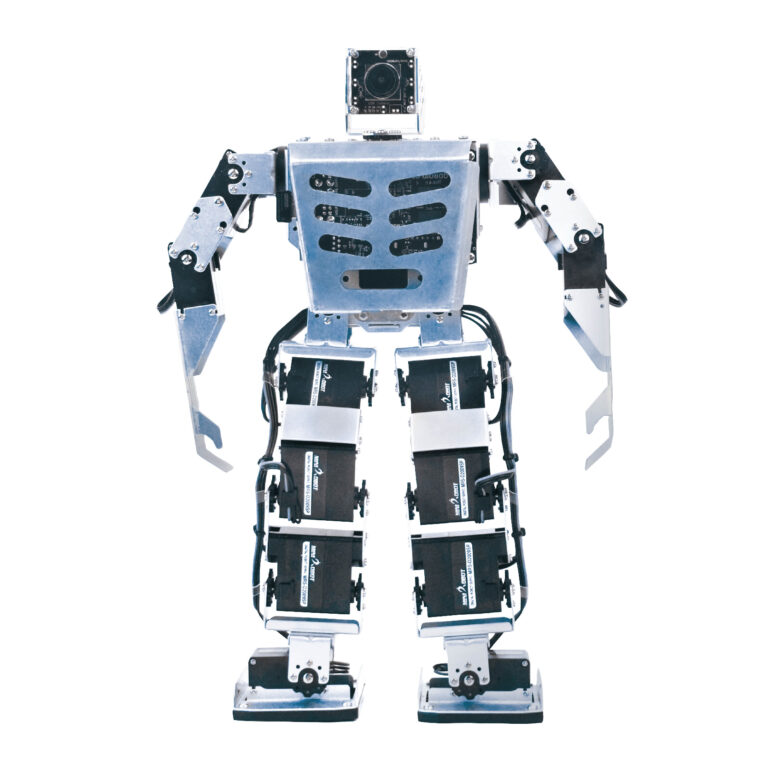
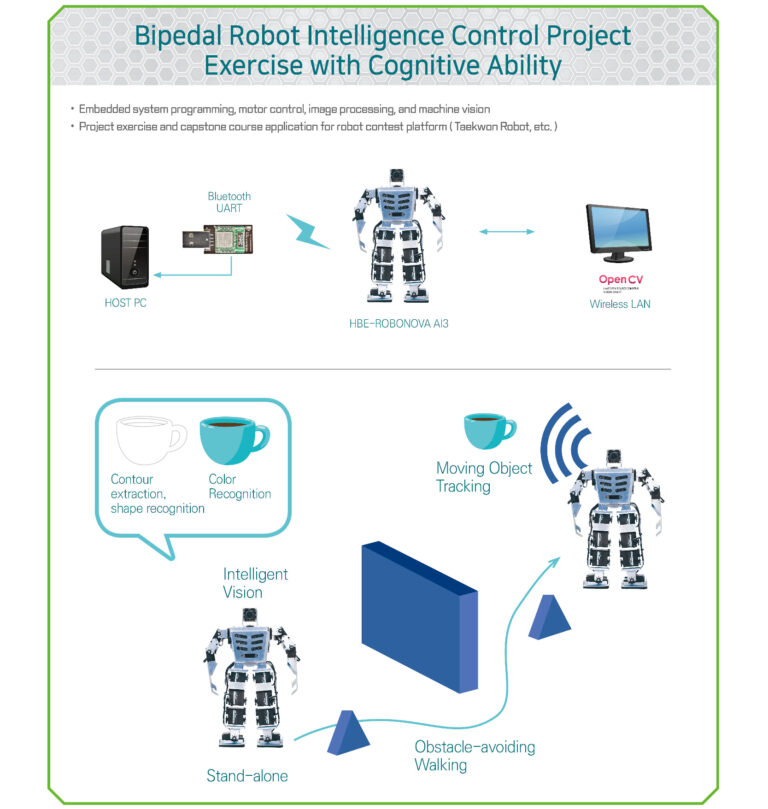
HBE-ROBONOVA AI 3 is an intelligent 16-joint biped robot with an MR-C3024 controller board capable of controlling 32 servo motors simultaneously and an Amlogic embedded processor for high-resolution image acquisition, image processing and intelligence algorithms.
By equipping the existing biped robot with a brain board and a visual module, it is possible to perform intelligent actions as well as perform simple robot operations that were previously made and stored in the PC.
HBE-ROBONOVA AI 3 is an intelligent motion robot that processes video and vision algorithms and is the optimal platform to provide future intelligent robot education environment.