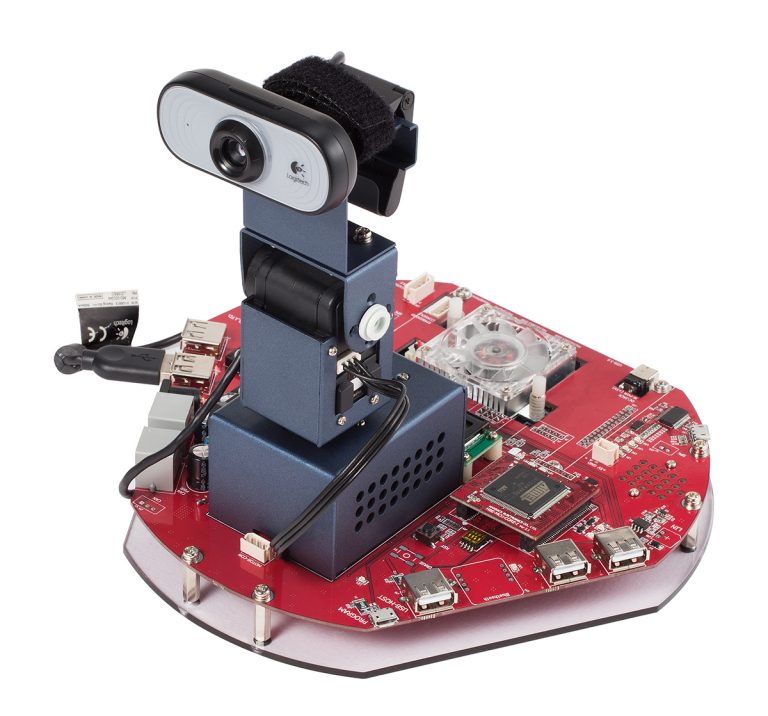
HBE-RoboEX-Brain은 모듈형 구조와 개방형 전자장치 제어 플랫폼인 아두이노를 프로그래밍 환경과 OpenCV for Android Platform를 제공해 적극적인 참여(Technology)와 체험 중심의 학습(Science) 과정에서 습득한 아이디어를 추상화(Mathematics) 화해 작동 가능한 프로토타입(Engineering)을 설계할 수 있는 지능형 로봇 지능 학습 모듈 입니다.
제품 특징
적극적인 참여와 체험 중심의 학습이 가능하도록 모듈화 설계를 채택했으며 로봇 지능 모듈의 개별 학습과 협력 학습이 모두 가능합니다.
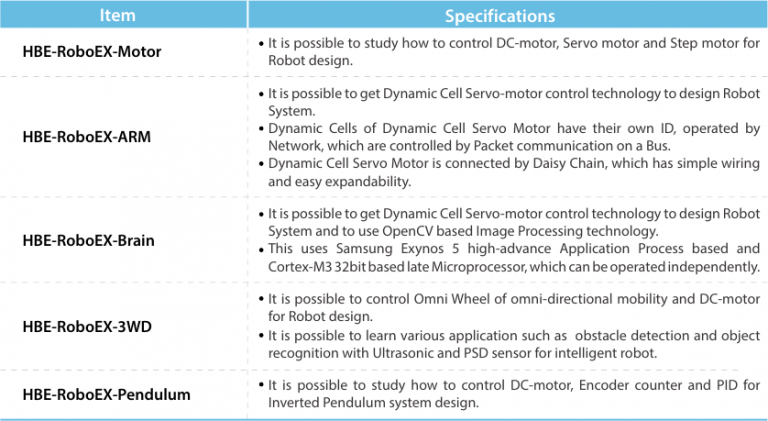
로봇 지능 모듈은 로봇 시스템 설계에 필요한 다이나믹셀 서보 모터 제어 기술 습득과 OpenCV기반 영상 처리 기술을 활용할 수 있습니다.
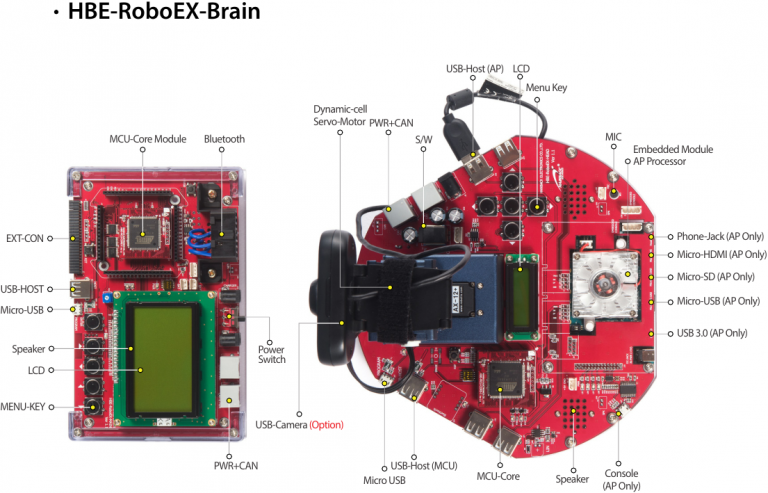
로봇 지능 모듈은 삼성 엑시노스 5 고성능 어플리케이션 프로세서 기반과 Cortex-M3 32bit 최신형 마이크로프로세서가 탑재되어 있어 독립적으로 운영할 수 있습니다.
최고 사양의 임베디드 모듈과 프로세서로 직접 제어하는 로봇 모듈을 통해 지능형 로봇 시스템 설계와 서비스 개발에 필요한 지식과 경험을 제공합니다.
우분투와 같은 별도의 리눅스 호스트 환경 없이 윈도우 운영체제에서 리눅스 커널을 빌드하고 커널 모듈과 디바이스 드라이버 프로젝트를 생성한 후 빌드 및 타깃에 설치 하는데 필요한 통합 개발 환경을 제공합니다.
캡스톤 디자인과 같은 창조적인 융복합 응용 경험을 제공하기 위해 지능형 로봇 모듈을 유선(USB3.0)/무선(블루투스4.0+WiFi)으로 연결해 스마트 디바이스로 로봇을 제어 할 수 있는 환경을 제공 합니다.
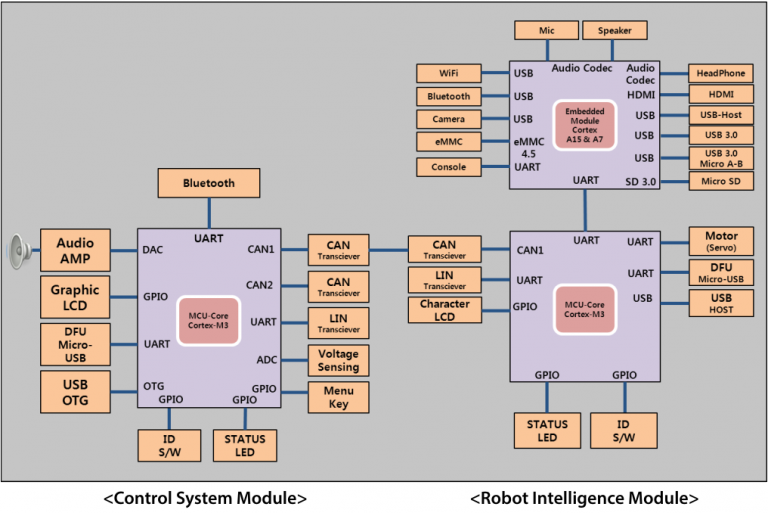
무결성이 요구되는 지능형 디바이스 네트워크 구축에 사용되는 CAN 통신으로 필요한 모듈들을 상호 연결해 협력 모델로 운영할 수도 있습니다.
CAN 통신과 전원이 하나의 케이블에 구성되어 상호 연결 협력 모델로 운영시 능률적이고 효율적인 네트워크 구축을 할 수 있습니다.
다이나믹셀 서보 모터는 네트워크 구동으로 고유의 ID를 가진 다이나믹셀들은 하나의 버스상에서 Packet통신으로 제어됩니다.
다이나믹셀 서보 모터는 Daisy Chain으로 연결되어 배선이 간단하고 확장이 수월합니다.
프로그래밍 환경으로 개방형 전자장치 제어 플랫폼인 아두이노를 채택함으로써 하드웨어 제어에 필요한 특수성을 최소화해 동작 정의에 필요한 모터 제어 및 센서로부터 상태 정보를 획득하는 방법을 일반화시킬 수 있습니다.
구글 ADK(Accessory Development Kit)를 지원해 스마트폰이나 태블릿에서 로봇 지능 모듈의 동작을 제어하고 센서 값을 모니터링 할 수 있습니다.
WiFi와 블루투스를 지원해 스마트폰이나 태블릿에서 로봇 지능 모듈의 동작을 제어하고 센서 값을 모니터링 할 수 있습니다.