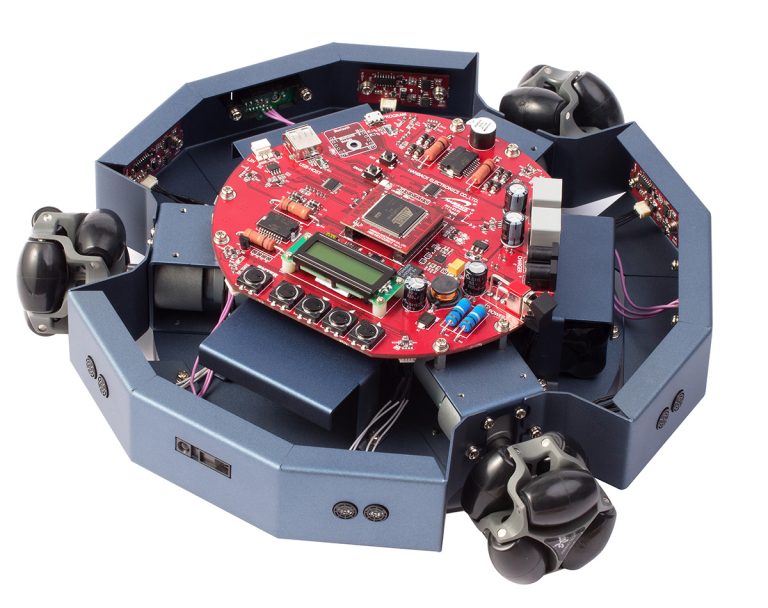
HBE-RoboEX-3WD는 모듈형 구조와 개방형 전자장치 제어 플랫폼인 아두이노를 프로그래밍 환경으로 제공해 적극적인 참여(Technology)와 체험 중심의 학습(Science) 과정에서 습득한 아이디어를 추상화(Mathematics)화해 작동 가능한 프로토타입(Engineering)을 설계할 수 있는 지능형 로봇 구동체 학습 모듈 입니다.
제품 특징
적극적인 참여와 체험 중심의 학습이 가능하도록 모듈화 설계를 채택했으며 로봇 구동체 모듈의 개별 학습과 협력 학습이 모두 가능합니다.
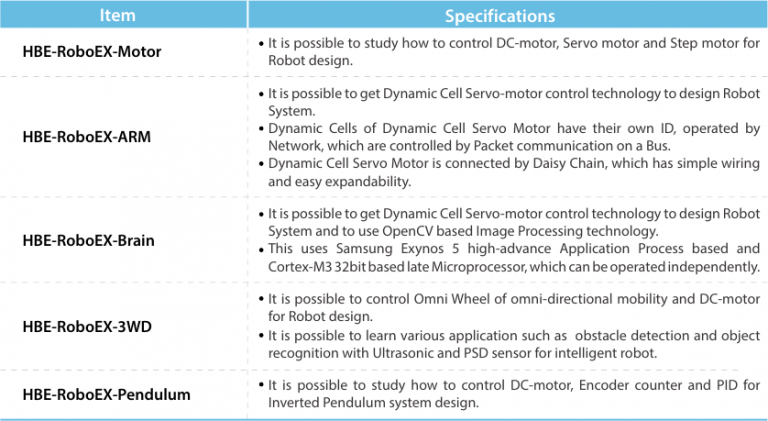
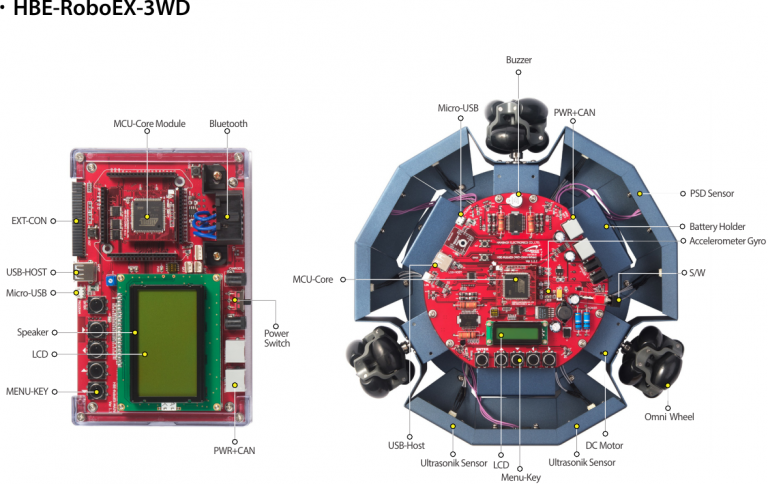
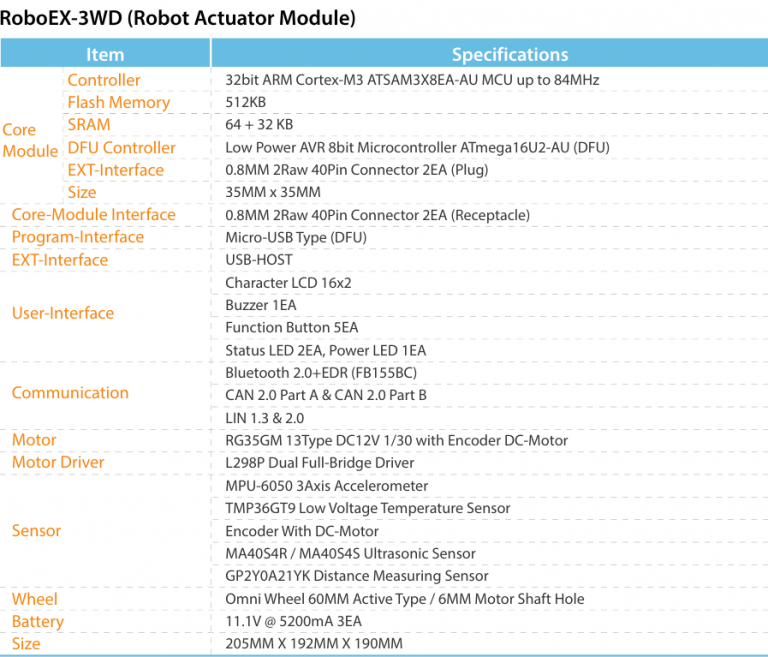
로봇 구동체 모듈은 로봇 설계에 필요한 DC-모터, 전 방향 이동 가능한 옴니 휠 제어 기술 습득이 가능합니다.
로봇 구동체 모듈은 로봇 설계에 필요한 초음파 센서와 적외선 거리 감지 센서(PSD) 활용 기술 습득이 가능하고, 지능형 로봇 응용으로 물체 탐지나 장애물 인지 등 여러 학습이 가능합니다.
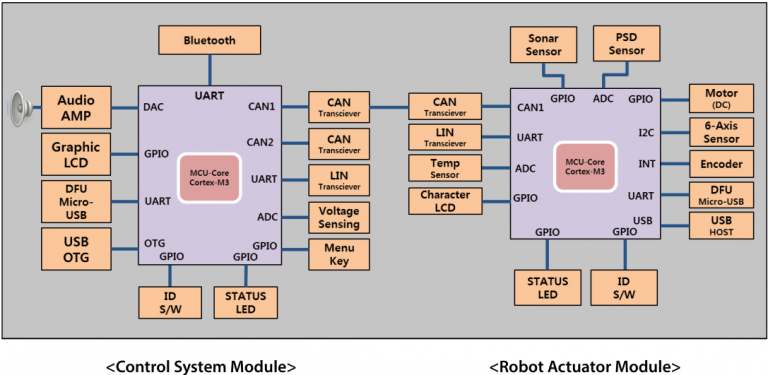
로봇 구동체 학습 모듈은 Cortex-M3기반의 32bit 최신형 마이크로프로세서가 탑재되어 있어 독립적으로 운영할 수 있습니다.
무결성이 요구되는 지능형 디바이스 네트워크 구축에 사용되는 CAN 통신으로 필요한 모듈들을 상호 연결해 협력 모델로 운영할 수도 있습니다.
CAN 통신과 전원이 하나의 케이블에 구성되어 상호 연결 협력 모델로 운영시 능률적이고 효율적인 네트워크 구축을 할 수 있습니다.
프로그래밍 환경으로 개방형 전자장치 제어 플랫폼인 아두이노를 채택함으로써 하드웨어 제어에 필요한 특수성을 최소화해 동작 정의에 필요한 모터 제어 및 센서로부터 상태 정보를 획득하는 방법을 일반화 시킬 수 있습니다.
구글 ADK(Accessory Development Kit)를 지원해 스마트폰이나 태블릿에서 로봇 구동체 모듈의 동작을 제어하고 센서 값을 모니터링 할 수 있습니다.
블루투스를 지원해 스마트폰이나 태블릿에서 로봇 구동체 모듈의 동작을 제어하고 센서 값을 모니터링 할 수 있습니다.