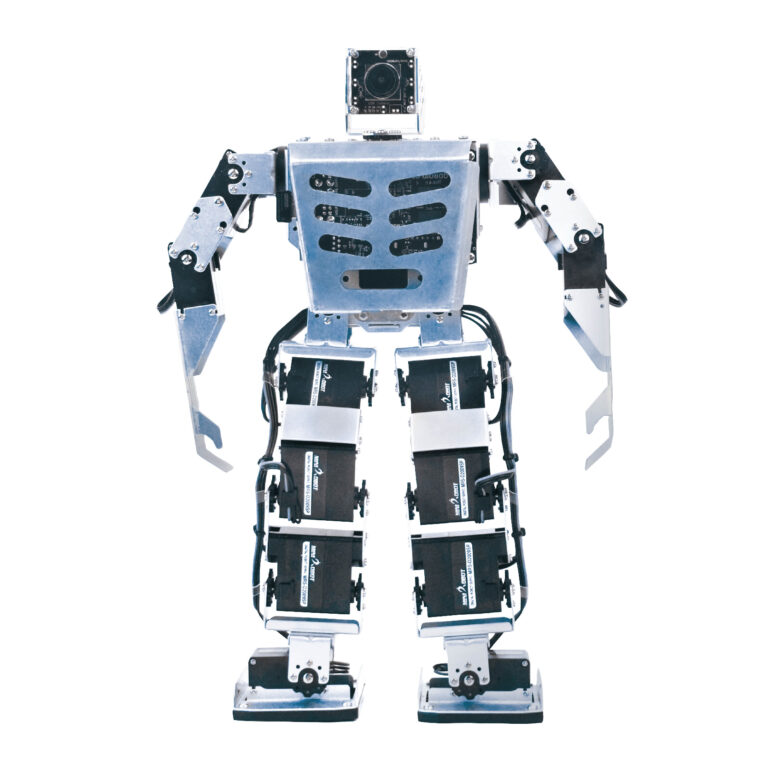
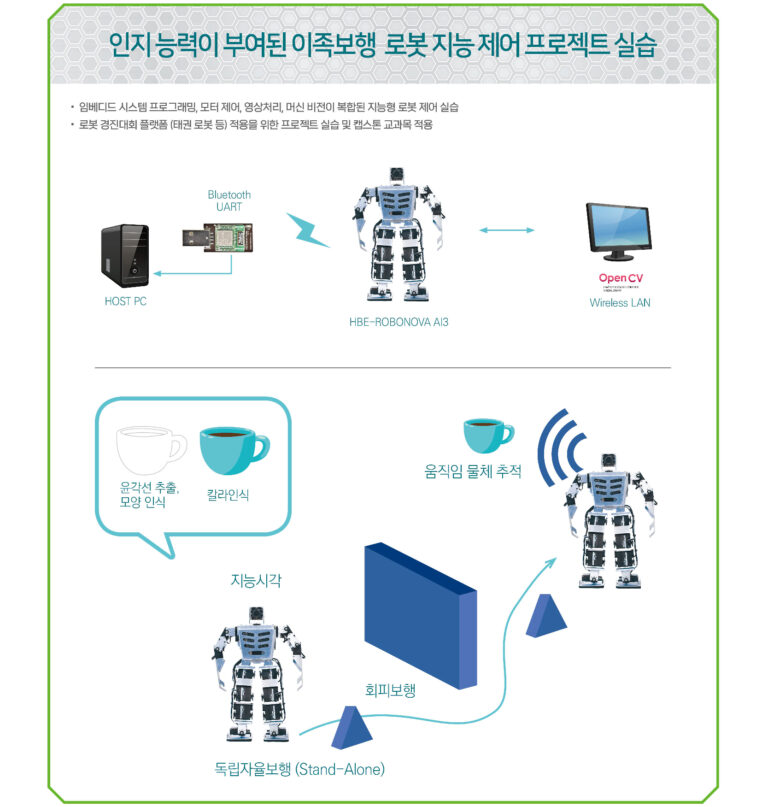
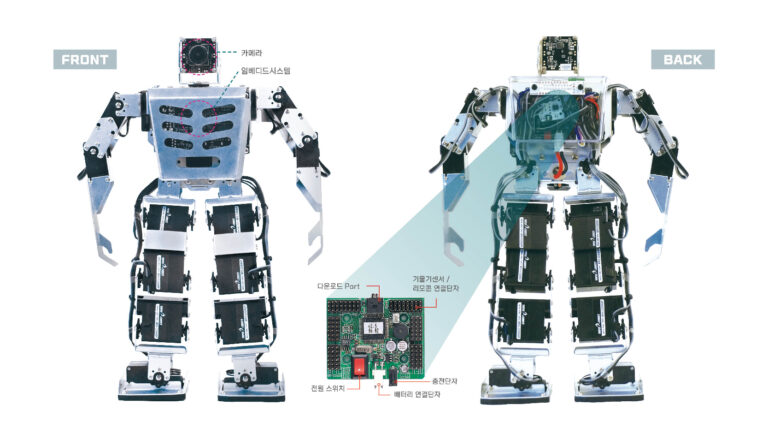
HBE-ROBONOVA AI 3는 32개의 서보모터를 동시에 제어할 수 있는 MR-C3024 컨트롤러 보드와 고해상도 영상취득 ,
영상처리 및 지능 알고리즘을 수행하는 Amlogic 임베디드 프로세서가 장착된 지능형 16관절 이족 보행 로봇 입니다 .
기존의 이족보행 로봇에 두뇌보드와 시각 모듈을 장착함으로써, PC에서 미리 만들어서 기억시켜 놓은 단순한 로봇 동작
수행뿐만 아니라 지능적 행동을 가능하게 하였습니다. HBE-ROBONOVA AI 3는 영상과 비전 알고리즘 처리를 통한
지능 동작 로봇으로, 미래의 지능형 로봇 교육환경을 제공하는 최적의 플랫폼입니다.